
品牌
其他厂商性质
深圳市所在地
近年来,高光谱遥感技术已经越来越多的用到农业、林业、地质、海洋、气象、水文、军事、环保等领域,形成了一个从地面到空中,乃至空间,从信息数据收集、处理到判读分析和应用,对进行探测和监测的多层次、多视角、多领域的观测体系,成为获取地球资源与环境信息的重要手段。
目前常用的航天或航空遥感,虽然其可以实现大面积同步观测,时效性强,获取信息受条件限制少,但是其数据获取成本较高,数据精细程度不足的缺点不可忽视。而近地遥感时间灵活,可以进行小范围细节探测,提供精细的分析数据,但同时它的缺点同样存在,如大面积数据的获取速度较慢,有一些地区自然条件恶劣不适合人为采集,所以目前近地遥感仍局限于基础研究和数学建模当中,在一些实际应用中仍然受到限制。
针对这一情况,莱森光学(Lisen Optics)公司实现了无人机搭载高光谱地物光谱仪测试系统。该系统在实现了较大面积检测,受限条件小的同时,可以快速,精细的获取数据,很好的结合了航空遥感和近地遥感的优点,避免了两者的缺点。
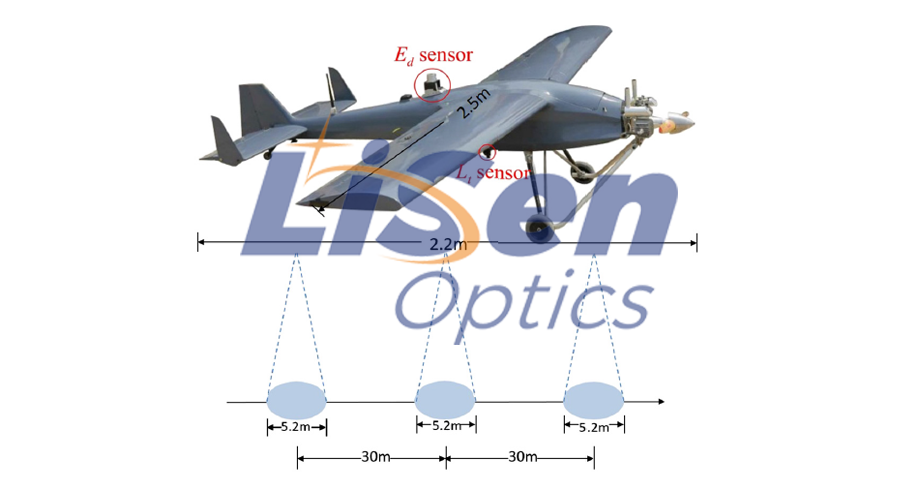
该系统无人机需人为操控,双通道或三通到高光谱采集系统由微型处理器控制自动记录GPS信息,采集天空和地面的光谱数据,如天空总辐照度,水体的离水辐亮度,地物的反射光谱等参数。
典型应用
1.海洋、湖泊水色遥感研究
2.卫星数据地面验证
3.水体剖面测量
4.水质分析(叶绿素、悬浮物、CDOM)
5.海岸带研究
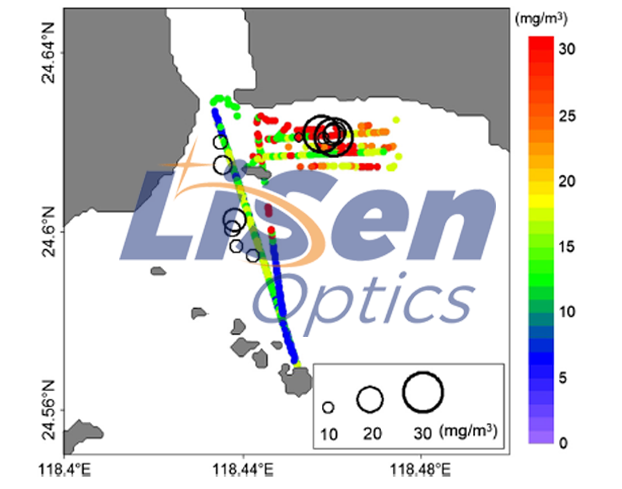
典型案例-海洋赤潮危害遥感监测
通过无人机机载双通道或三通道高光谱遥感光谱仪,用于自动化采集水体反射光谱信息,进一步得到水体遥感探测需要获取的光谱信息:离水辐亮度Lw、归一化离水辐亮度LwN,遥感反射率Rrs。


无人机机载高光谱介绍
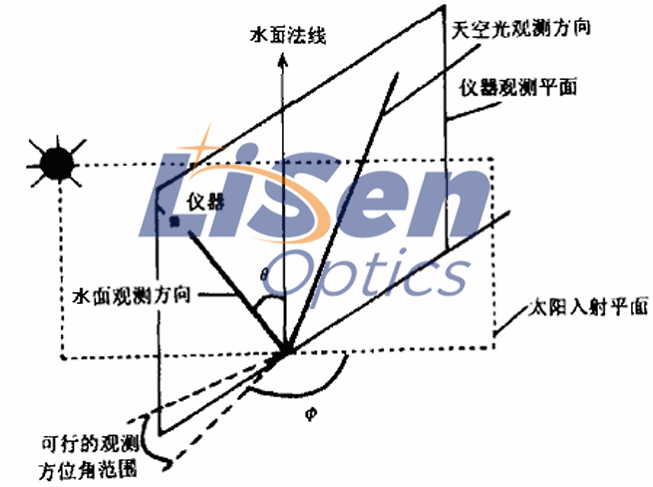
1.获取光谱数据的方法
水体遥感探测需要获取的光谱信息:离水辐亮度Lw、归一化离水辐亮度LwN,遥感反射率Rrs和刚好处于水面以下0-的辐照度比R。可按照如下的计算公式得到,
Lw = Lsw - rLsky
LwN = LwF0/ Ed (0+)
Rrs = Lw/ Ed (0+) = LwN/ F0
R (0-) = Eu (0-) / Ed (0-)
其中需要测量的参数有
1)水面辐亮度Lsw:通过向下一通道光谱仪测量“水面辐亮度”
2)天空散射光辐亮度Lsky:通过向上一通道光谱仪测量“天空散射光辐亮度”
3)水面入射总辐照度Ed(0+):现场测量(此方法需要三通道):L_WN=L_W×F_0/E_d (0^+)其中F0为平均的大气层外辐照度。通过向上一个通道光谱仪测量“入射总辐照度”。遥感反演(此方法适用于双通道测量):L_WN=(r⁄R)^2 L_W/[t(λ,θ_0 )(1-ρ(θ_0))cos(θ_0)]其中t(λ,θ_0 )为大气透过率;ρ(θ_0 )为气水界面Fresnel反射率;R为地球到太阳之间的平均距离;r为测量是太阳到地球的距离。
无人机机载双通道高光谱遥感光谱仪开发项目主要分为两大部分:无人机和双通道或三通道高光谱光谱仪。
2.无人机部分(固定翼)
其主要技术参数如下:
1)飞行速度 :110km/h=30.5m/s
2)续航时间:大于3小时
3)平稳度:左右摇摆可以控制在3度范围内,前后俯仰可以控制在5度范围内
4)飞行高度:400-1100m
5)舱内温度:和外界温度相同
6)舱内空间:20cm×14cm,高度不限
7)载重:1.5kg~2kg
同时,无人机舱顶和舱腹可以按要求(尺寸和位置)设计观察孔。另外不需考虑防水罩问题。
3.高光谱光谱仪部分
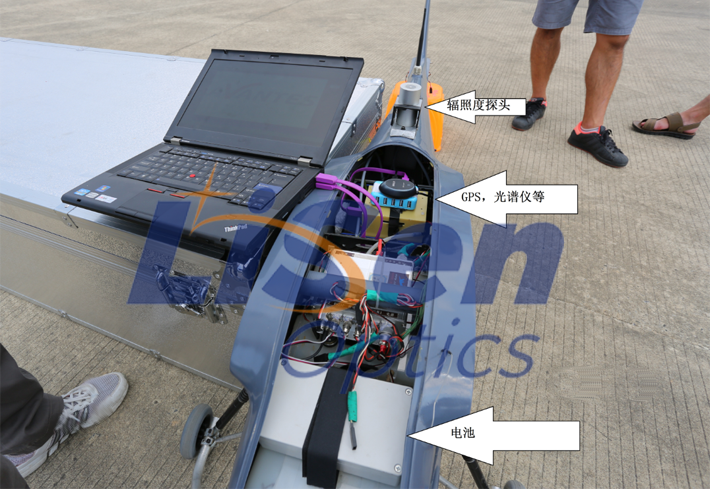
高光谱光谱仪部分由光学平台、光纤探头、控制模块、供电模块、数据存储模块等部分组成,本项目对光谱仪的要求如下:
1)采用双通道或三通道高光谱光谱仪,采集参数为水面辐亮度和天空总辐照度、天空散射光辐亮度等。
2)光谱仪能够实现自动采集。
3)探头视场角度可更换调整。
4)固定在无人机探头固定件设计需要可调。
5)探头测量角度可调。
6)可保存GPS信息。
7)光谱仪应含有供电系统,续航时间应大于3小时。
8)整套光谱仪系统重量不应超过4-5kg。
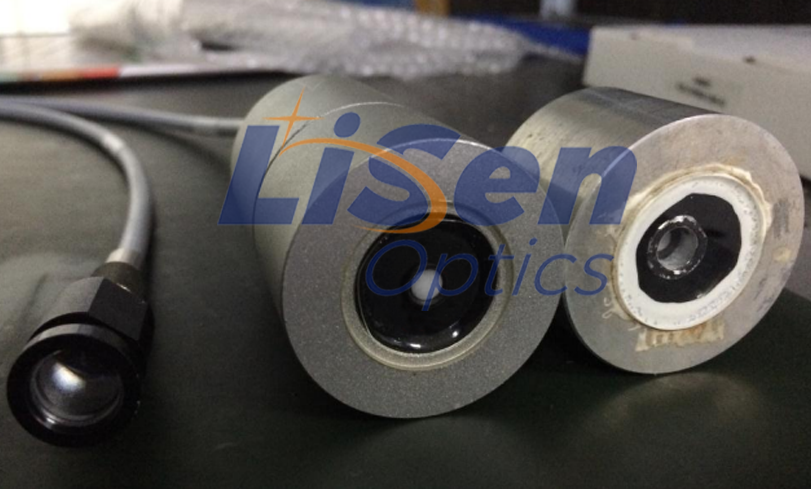
辐亮度和辐照度探头
飞行区域
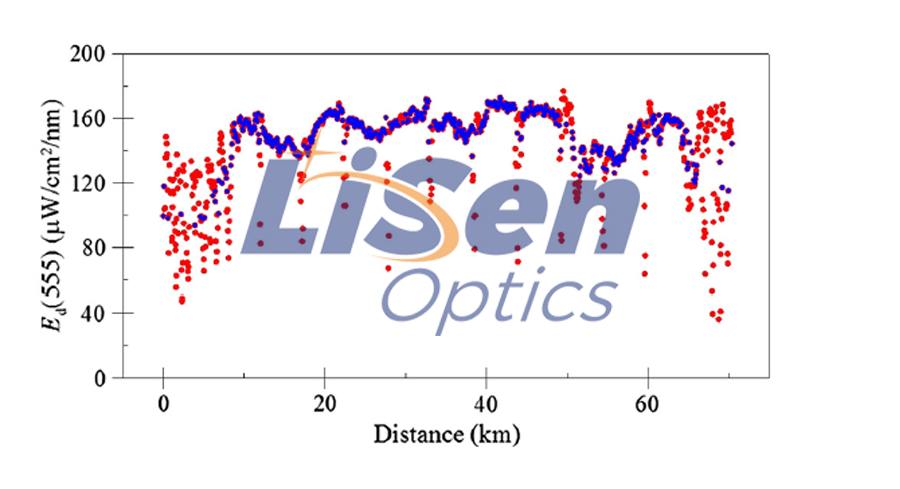
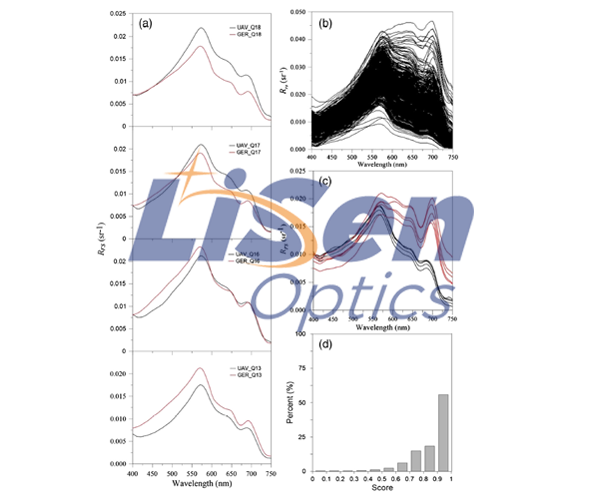
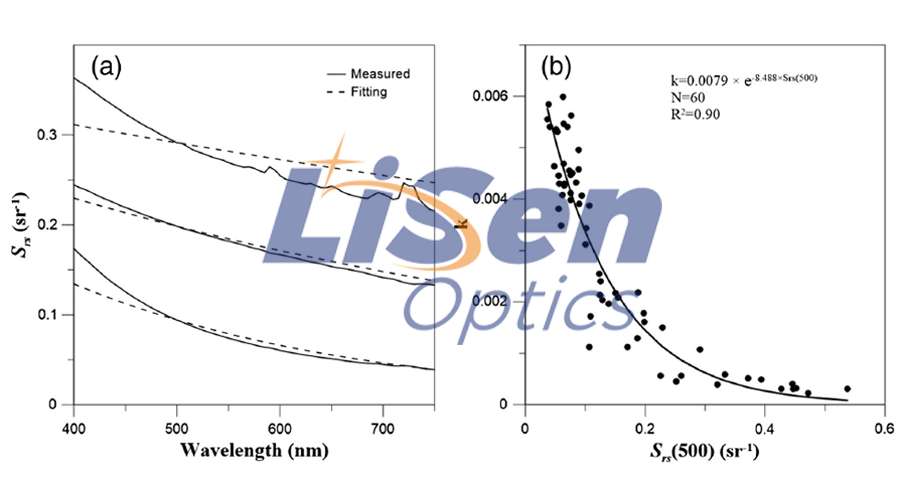
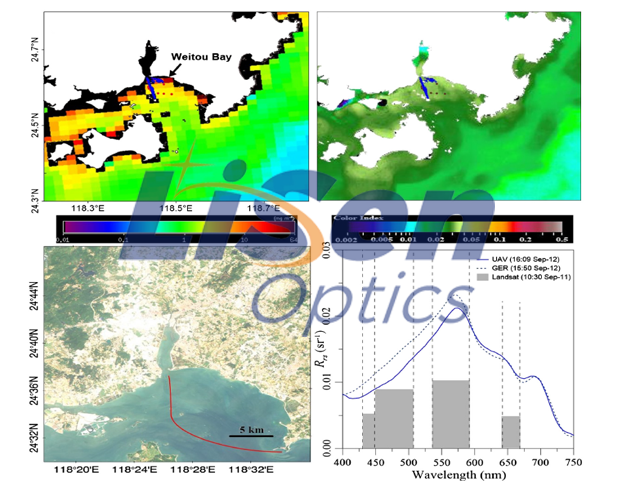
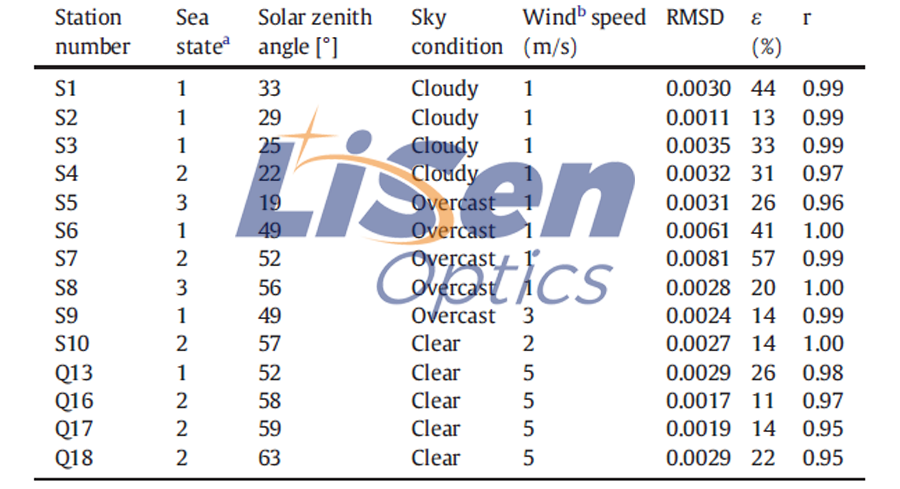
备注:图例为UAV为我司定制无人机载高光谱测试数据和GER地面高光谱数据对比
主要技术指标
型号 | iSpecHyper-W300 | |
无人机(固定翼) | 飞行高度 | 300m |
飞行速度 | 110km/h | |
高光谱光谱仪 | 探测器 | 2048像素面阵CCD探测器 |
光谱范围 | 300-1100nm | |
GPS | YES | |
分辨率 | 1.4nm | |
供电充电电池组 | 工作时间4h | |
水面辐亮度 | YES | |
天空散射光辐亮度 | YES | |
水面入射总辐照度 | YES | |
数据自动化采集 | YES | |
探头测量角度可调 | YES | |
探头视场角度可调 | YES | |







